I work in both the hardware/physical realm and the theoretical/mathematical realm. My projects include design and development of new hardware for the purposes of cutting edge research, as well as development of new mathematical frameworks, techniques, and implementation strategies to be combined with these new technological innovations. I am also interested and involved in various experimental and industrial projects.
My interests are broad. I work in various aspects of robotics, mechatronics, neuroscience, artificial intelligence, mechanical engineering design, electrical engineering, computer graphics, optimal control and system identification theory. Currently peripheral but important interests include fluid dynamics and optimal use of alternative energy sources.
My PhD topics focused largely on methods of system identification experiments, modeling and analysis of movement control and skill acquisition in humans. The intention is to combine estimation and control to characterize nature's approach to learning. This approach can then be used to formulate therapeutic strategies for individuals recovering from brain damage, or those wishing to train for superior performance on a visual-motor task. On the robotics and mathematical side this approach can be used as a model for skill formation of robotic devices, as well as adaptive control systems functioning with large uncertainties.
Some of my research involves active exploration, including active sensing. A mathematical framework has been developed with positive results. I have implemented these algorithms in realtime systems such as modular robotic fingers (which I was the primary developer of), cooperative autonomous robotics, multipedal robots, and further human subject experimentation. Use of virtual reality plays a key role in presentation of stimuli in these experiments, so I led a team of engineering students at UCSD to develop a haptic virtual reality robot design for human interfacing, experimentation, and assessment. I also implemented a telerobotics interface using a data glove I developed that measures human hand joint positions accurately and can map them into virtual or robotic digit space. One can also be presented with haptic feedback in realtime through this system.
Another exciting development was the ModBot modular robot (a finger and a finger/leg version). These robots are bio-mimetic robotic devices designed and built from the ground up in collaboration with Mike Kelley, Emo Todorov, and Robert Mabery, with me as project leader (and Emo as advisor). They are among the world's best robotic devices for manipulation and locomotion studies (discussed here). The robots (detailed here) are cable-driven, have very low friction and inertia, have a high communication bandwidth, onboard processors, built-in touch/force sensing, support a variety of communications protocols, and very dynamic capabilities. All these features help them to be exceptionally useful for locomotion, manipulation, artificial limbs, rehabilitation, assessment, virtual reality/haptics, and teleoperation/telemanipulation. The lessons learned from those devices are being applied to new robotic systems under development.
The newest news is that several new projects are under way through RDP Robotics, LLC - a San Diego-based robotics company I have founded. These range from new robotic limbs and hybrid dynamic robots, to motion capture modules, AI systems, vision sensors and reconfigurable alternative energy generators. These projects are aimed at addressing human-robot interactions, rehabilitation, neuroscience studies, and application of robotics to optimize energy production, especially for third world countries and emergency situations. We are also working on disease modeling and control using machine learning, AI and control theory.
Affiliations
RDP Robotics (2006-present)
Radiant Dolphin Press (1990-present)
Previous Affiliations
IEEE Member
UCSD Temporal Dynamics of Learning Center (TDLC)
UCSD MAE Design Studio (1999-2015)
SDSU Department of Mechanical Engineering
(2014-2015)
MOCAP (Motion Capture and Brain Dynamics Laboratory), UCSD (2006-2010)
MCL (Movement Control Laboratory), University of Washington Department of Computer Science and Engineering (2009-2012)
MCL (Movement and Control Laboratory), UCSD Cognitive Science Department (2004-2010)
SICL (System Identification and Control Laboratory), UCSD Mechanical and Aerospace Engineering Department,
A branch of the Dynamical Systems and Control (DSC) Group (2003-2009), now referred to as the Center for Control Systems and Dynamics (CCSD)
Schneider Research Group (2000-2004)
Topics
Selected research and industry-based engineering project list
(The longer descriptions are selections of projects. I am in process of updating this section, please see the papers section for my most recent project papers and results. Not all projects are detailed below yet.)
*Selected Project list
Post-Doctoral
ModBots (finger and leg) modular biomimetic robotic systems (see below, and paper)
Studies in locomotion and manipulation, as well as relationships between active sensing and the aforementioned skills
(see below, and paper and animations)
Psychophysical experiments upon humans undergoing challenging motor control tasks, and modeling movements with model predictive control (see below)
Ping pong motion capture and optimal control project
EMG/Motion capture of humans during complex manipulation, hand postures, and dynamic motions
Diego-San Pneumatic Humanoid Robot
Identification and control of a high dimensional pneumatically actuated humanoid robot (see below and see paper)
Models and methods for intelligent control of high dimensional coupled compliant systems (in process)
Chaotic convection loop control experiment design/development
Powerball alternative energy project (industry sponsored)
Experiments in auditory perception (psychology department)
Team leader, UCSD human powered sub-team model, non-propellor-driven
*ModBot biomimetic modular robotic systems
An image of three ModBot prototype modules attached to a base, manipulating an iPhone.
These devices represent an evolution of biomimetic robotics. It began with the tripedal robot project, where we realized that a system must be backdrivable, and posess other biomimetic qualities to be useful for developing algorithms that mimic biological control systems. That is not to say we are trying to duplicate the structure of biological systems. This is a topic worked on by Yoky Matsuoka's group. The key idea is a bidirectional information flow from the mechanism itself, rooted in the design, as well as the control algorithm. By creating a system compliant at the actuators, interaction with the environment is dynamically 'experienced' both at the output and input ends. This makes the system useful for dynamic manipulation and (in the case of the leg) locomotion tasks. The constrained design methodology employed also avoids compromise in terms of information bandwidth, robustness, response, compliance, small size, mass, inertia, precision, sensitivity, and more. These devices are also modular, wireless, and self-contained, and so do not require external electronics which act like a weight chained to the system. Finally, they are robust, and so one can bravely attempt control algorithms which may lead to instabilities without fear of damage, an important (but often ignored) feature in developing cutting edge control algorithms!
I have been involved in all aspects of the design and development of these systems (mechanical, electronic, software, embedded system, sensors, etc.), developed in collaboration with Mike Kelley, Emo Todorov, and Robert Mabery. They devices are being used for a number of research projects, and they are also in process of being patented and commercialized for broader impact. A recently published paper in ICRA 2011 describes the design methodology..
Applications will include (but are not limited to) advanced motor control research, rehabilitation, assessment, virtual reality, and artificial limbs.
Video 1
: Overall demo
Video 2
: Robustness
Video 3 : Dynamics
Video 4: Passive motion
Video 5: Replaying motion
*Locomotion and manipulation with stochastic model predictive optimal control
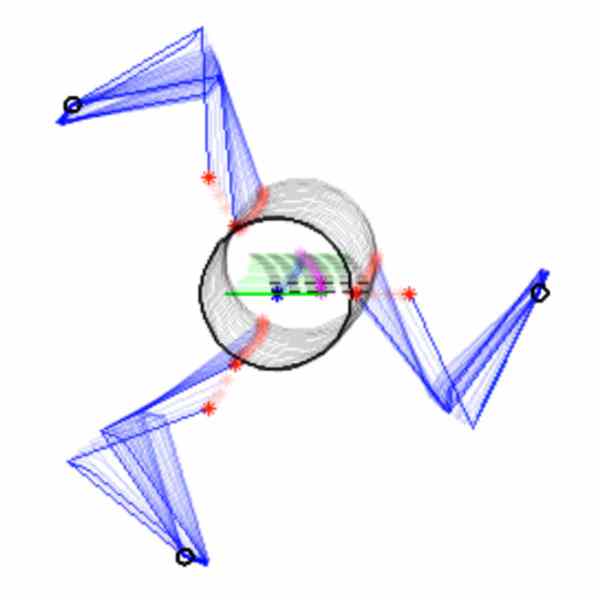
The problem of locomotion and manipulation is an interesting one. There are a number of attempts at solutions to the problem of locomotion, but they are all limited in a number of ways. Typically they work only over narrow types of terrain, they are very 'non-biologically driven' in design, or 'hacked together.' There is no solution which addresses the dynamic complexity and breadth of behaviors that biological control systems are capable of. This is a problem which we are working on from an optimal control perspective. The problem of dynamic manipulation is largely unsolved, and we apply similar strategies which are a next step from existing locomotion strategies. These problems both involve nonlinearities, redundancy, high dimensionality, complex contact, collision, and interaction phenomena, underactuation, uncertainty, and more. One unique characteristic of this work which is new is that we address the problem of manipulation and locomotion as essentially the same. Our emphasis is on dynamic realtime solutions which do not have any component computed offline. We accomplish this by breaking up the single difficult problem into smaller more tractable problems. Results are presented supporting this method in this paper and demonstrated with these animations. We currently have implemented this in a 2D setting, but the next paper includes a 3D representation. All results extend directly.
Three manipulators grip an object then apply forces to cause it to optimally track a reference.
An overview talk on the topic at the TDLC All Hands Meeting 2011 (Download here, or view above)
*Optimal tradeoff between exploration and exploitation
Rendering of the experimental setup.
Control in an uncertain environment often involves a trade-off between exploratory actions, whose goal is to gather sensory information, and "regular" actions which exploit the information gathered so far and pursue the task objectives. In principle both types of action can be modeled by minimizing a single cost function within the framework of stochastic optimal control. In practice however this is difficult, because the control law must be sensitive to estimation uncertainty which violates the certainty-equivalence principle. In this paper we formalize the problem in a way which captures the essence of the exploration-exploitation trade-off and yet is amenable to numerical methods for optimal control. The key to our approach is augmenting the dynamics of the partially-observable plant with the Kalman filter dynamics, thus obtaining a higher-dimensional but fully-observable plant. The resulting control laws compare favorably to other more ad-hoc approaches. Our formalism is also suitable for modeling human behavior in tasks which benefit from active exploration. (see paper)
*DiegoSan Humanoid Robot project
This is part of a collaboration with the MPLAB at CALIT2, headed by Javier Movellan and the MCL at UW headed by Emo Todorov. It is a 38-DOF humanoid pneumatic robot developed by Kokoro in Japan. We are using it to study human development from a motor control perspective including reaching, locomotion, and manipulation. It is challenging and interesting to control due to to the fact that the entire system is highly compliant and highly coupled. So if you want to reach with the arm, you have to control ALL the degrees of freedom to keep the system from collapsing due to the reaction forces and changing center of gravity. The idea is that by learning to control a system which is similar in the notion of compliance and coupling to a biological system, we will gain insights into development and biological sensorimotor control. We have some preliminary work in process, and have more on the way (see paper | see movie)
Presently we are working on full body coordination during standing, walking, and reaching.
*Psychophysical experiments upon humans undergoing challenging motor control tasks
A human subject bouncing a ping pong ball undergoing motion capture
In the first in this series of experiments, a subject is asked to bounce a ping pong ball under number of perturbation conditions. The resulting movement and ball trajectories are recorded with a VICON motion capture system. The movement is modeled with system identification and model predictive control. One of the other primary researchers for this project is Ruth Joanne Jao, and the PI is Emo Todorov.
A second in this series is an experiment to perform active motion capture using a Phasespace motion capture system and a BioSemi active EEG/EMG system to simultaneously capture EMG and position data from a human performing a maximally complex series of movements with their hands, while recording from their forearm muscles. The intent is to determine a relationship (mathematical model) between the activation patterns and movement dynamics.
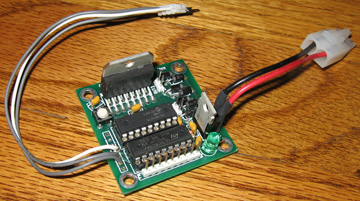
*Microprocessor-based multiple pulse width modulation motor driver for education and light industrial applications
This device was initially developed (top image) for use in MAE156A, when we found that we could not purchase such a thing. It is a serial motor driver capable of driving up to 10 motors, 2 bidirectionally, all independently controlled speeds. It can also output a time base, and drive two stepper motors. Interfacing with the drivers is simple with two wires - one for communication, one for ground reference. I developed this and the associated algorithm originally to save the department from losing so much hardware every quarter when students damaged it. It was simple enough to explain the components while complex and robust enough to be forgiving with overcurrent protection circuitry and a large fuse which is easy to replace. The main components are also replaceable, which makes each motor driver less of a 'throwaway' electronic part. They are also created using all ROHS-compliant components and manufacturing processes which is better for the environment and safer for whoever is using them.
A second version (lower image) was developed which is more robust, handles more current, outputs a time base, and is available to other researchers, hobbyists, and industry from RDPRobotics. Currently a third version is in development which will further improve the device.
The official product page is now relegated to legacy products at RDPRobotics, and though it can no longer be ordered we are developing industrial versions that will be available soon (interested? Please click contact us or email at alex@robotics.radiantdolphinpress.com). Considering what they do, they are extremely inexpensive. I have used them in research and various automation projects. They have been used in a number of UCSD research projects and courses, and was part of a project at the University of Washington. They have also been used in a variety of commercial projects as well, which I have provided project input on.
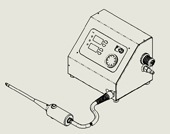
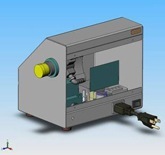
*Industrial product development for 3D Engineering Corp. - Microprocessor Hardware and software development of an intelligent inflation device "Precision Inflator"
This project was part of a period during graduate school working for 3D Engineering Corp. as a Mechanical Engineer.
There is a company that manufactures bags which substitute for packing peanuts (upper right in image), and they came to 3D with a problem. These bags block conduction, convection, and radiation by design, but must be filled with air (they posess channels to be inflated). The problem is that the bags are stored in massive stacks, and tend to have 'sticky points' where the channel gets stuck together and the inflator needs to deal with this while still inflating the bag to a goal pressure and volume.
I was part of a team at 3D Engineering that developed this precision inflator which uses an intelligent algorithm as part of an embedded system I developed to detect these sticking points, apply a series of pulses and other strategies to free the channels, then fill the bags to desired volumes and pressures.
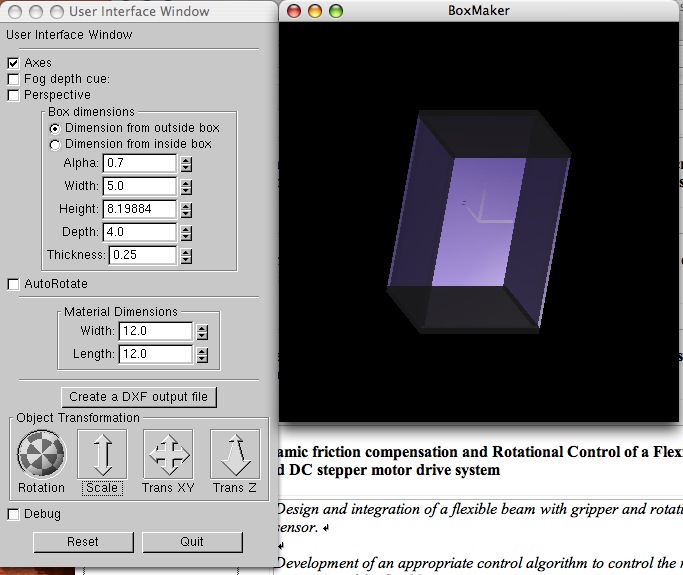
*Boxmaker software design and devlopment - 3D simulation and design software for lasercamm rapid prototyping machine
This project stemmed from a need - I was a TA, always having to design boxes for robot contests. I became tired of repeatedly computing the dimensions, drawing the box components in autocad, saving the parts, and so on. I wanted something dynamic, which would allow me to visualize the box and help determine dimensions. I also wanted something that would output DXF files for me and deal with material thickness. I also thought it would be cool:) This is currently being used in the department of Mechanical and Aerospace Engineering at the University of California, San Diego in the design studio, quite regularly, I have been told.
It is available for free download from the code section of my page here, along with instructions. Please let me know (send me an email) if you use it, and it is useful for you! Also, if you want more features, please request them!
I have a version which also optimally places the parts on a given material outline, which is useful for partially used materials, and optimal use of material to minimize waste. I have not yet released this version.
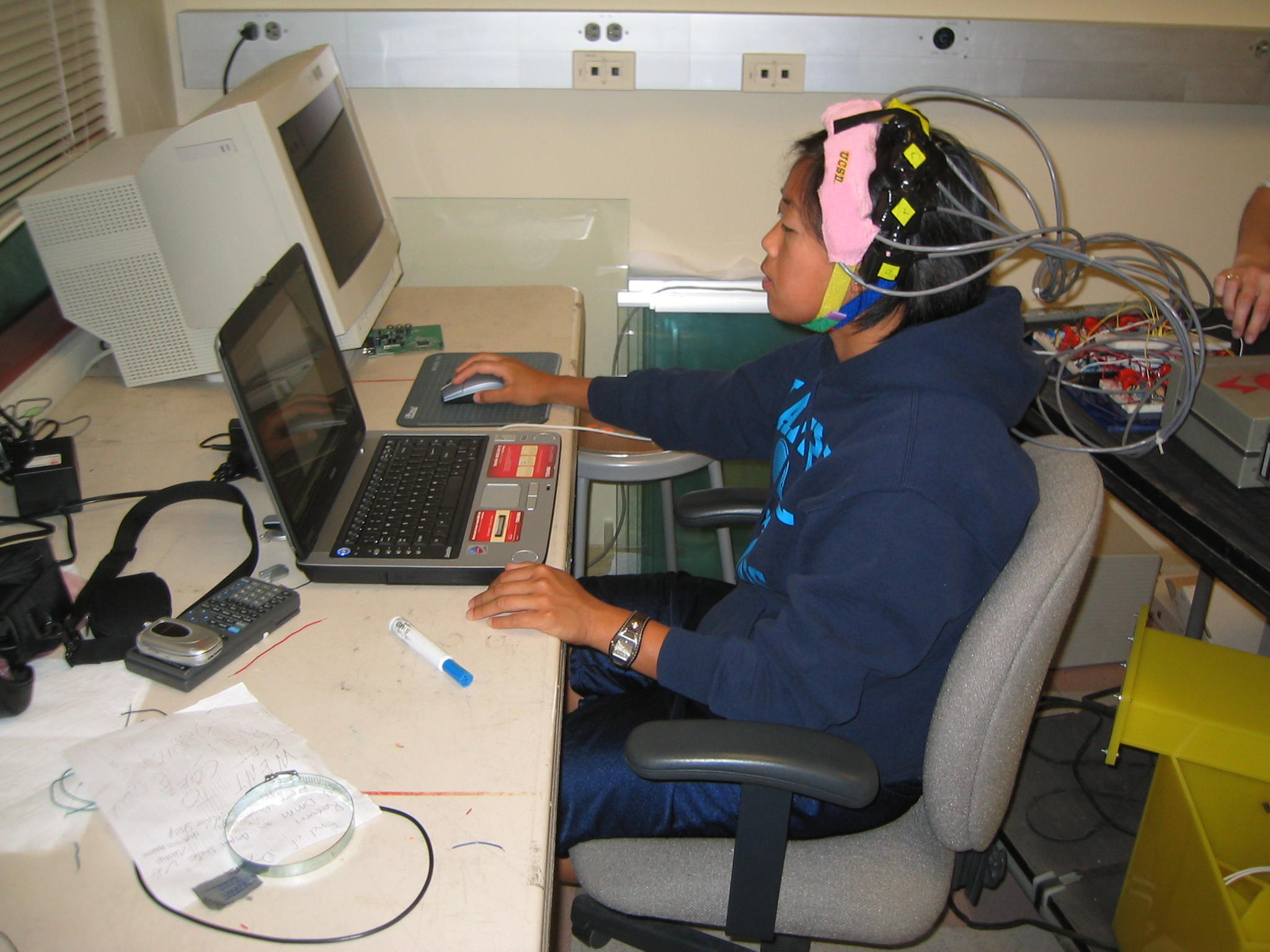
*Development of an active EEG system (sensors, amplifiers, filters and data acquisition system)
One of the undergraduate students who was part of the development team tests an early prototype.
Lack of funding spurred the notion of beginning with an open source design, and then improving it for application to research and educational settings which may be cost-sensitive. The resulting software and designs will be released, along with a paper showing comparisons to a commercial system.
This project was initiated as part of the UCSD MAE department course MAE 171b, senior experimental methods II. I advised and sponsored a group of four students regarding this project. In ten weeks we progressed from concept to a prototype which was comparable to an expensive commercial EEG system. Our system, additionally, was capable of being interfaced to Matlab, LabView, or any C program with National Instruments NIDAQMX drivers.
Not only was the project successful, but the students also reported a positive learning experience, having applied theory to a realworld application.
*Dynamic friction compensation and Rotational Control of a Flexible Beam project for a hybrid DC stepper motor drive system
Design and integration of a flexible beam with gripper and rotational actuator & sensor.
Development of an appropriate control algorithm to control the rotational movement of the flexible arm
– Dynamic modeling of flexible arm and gripper
– Development of trajectory planning
– Design of feedback control algorithm
Control is done with Matlab and Real-Time Workshop
*Novel applications of rapid prototyping for university research : producing successful projects
Early Projects
*Various student design and experimental projects
*Robopogo dynamic robot platform development, software, hardware and basic control design, early prototype phase
This was another project which was associated with my early graduate career. The goal was to develop a dynamic hopping robot which was like a robotic pogo stick. It was to be pneumatically powered, use air muscles, and be self-balancing (eventually capable of flips). I was part of several aspects of the early design, as well as early grant funding presentations. Later I advised the project in terms of mechanical design development, the development of the embedded system, pneumatic actuators, and experiments. It has been ongoing for several years now beyond my involvement but this was an excellent experience, and provided many interesting opportunities (as well as funding).
Gabe Graham created this version of the robopogo robot while studying for his masters at UCSD. I gave some suggestions, had many discussions, and helped with a model-reference feedback control concept to linearize the nonlinearities in the drive system.
*Robotic arm for stroke patient rehabilitation and assessment
This project was a part of my early graduate career. It involved hardware (electrical and mechanical), software, and embedded systems development, and was part of a collaboration with the VA Hospital at UCSD. Here I worked with another PhD student to develop a stroke patient rehabilitation and assessment robot. This was a unique design because the motor used was a direct drive motor, and so theoretically would have minimal friction and no backlash. The patient was then to be coupled to the device with a mechanism that had an integrated linear force sensor and a linear constraint such that the relative torque between the patient's elbow joint and the motor is measured (the mechanism translates the rotation into a linear motion measured at the endpoint of the patient arm). The entire system was controlled in realtime through a PC and custom software the development of which I was part. The software presented a variety of 'games' for patients to play, as well as assessment tools for therapists and doctors to use. As such it would take a variety of measurements characterizing the complex characteristics of patient behavior in a similar fashion to a blood panel. For safety we designed an embedded system-based 'watchdog timer' to monitor the computer program (make sure it had not crashed), and disengage the motor if any of a series of safety criteria were violated.
This was an expansion of an ongoing project started years earlier, which had produced several Masters and PhDs.There were a number of challenges to be addressed, including realtime control with Windows, integrating a data acquisition and embedded system, the mechanical design, constraining human joints to a robot accurately without significant force (for patients who were of older age, weak, had physical alteration of a joint, or were sensitive to compression).
This project was ultimately sponsored by the Von Liebig Center for Entrepreneurship and Technology Advancement at UCSD.
Undergraduate Engineering projects
*Chaotic convection loop development and simulation
*Powerball industrial sponsored design project - development of a method and hardware testbed for periodic hydrogen generation for fuel cells
Computer graphics have seen a tremendous evolution in the last few decades. Applications to research include data visualization, visual stimulation and feedback for human experiments, navigation systems, computer interfaces, artificial vision, and more. Often many of these subjects are referred to as Virtual Reality, or simply VR.
*All images and material Copyright C. Alex Simpkins Jr. Ph.D., unless otherwise noted on this site*
 I work in both the hardware/physical realm and the theoretical/mathematical realm. My projects include design and development of new hardware for the purposes of cutting edge research, as well as development of new mathematical frameworks, techniques, and implementation strategies to be combined with these new technological innovations. I am also interested and involved in various experimental and industrial projects.
I work in both the hardware/physical realm and the theoretical/mathematical realm. My projects include design and development of new hardware for the purposes of cutting edge research, as well as development of new mathematical frameworks, techniques, and implementation strategies to be combined with these new technological innovations. I am also interested and involved in various experimental and industrial projects.